Computer Vision 06 - Instance & Panoptic segmentation
BoostCamp AI Tech
Computer Vision
Instance Segmentation
Mask R-CNN
YOLACT
YolactEdge
Panoptic Segmentation
UPSNet
VPSNet
Landmark Localization
Coordianate Regression
Heatmap Classification
Hourglass Network
DensePose
RetinaFace
CornerNet
CenterNet
03/11/2021
본 정리 내용은 Naver BoostCamp AI Tech의 edwith에서 학습한 내용을 정리한 것입니다.
사실과 다른 부분이 있거나, 수정이 필요한 사항은 댓글로 남겨주세요.
Instance,Panoptic segmentation
Instance segmentation
Semantic segmentation과의 Instance segementation이 다른 점은, 전자는 클래스만 구별하고 개체를 구별하지 않지만, 후자는 개체(Instance)까지도 구별한다는 점이다. 즉, 기존의 Semantic segmentation에서 distinguish instances라는 새로운 목표가 추가된 task이다.
Mask R-CNN
Faster R-CNN이 개량된 형태로, 큰 줄기는 비슷하다. Two-stage detector이다. 아래는 차이점들이다.
RoI Pooling(정수 feature) → RoIAlign(소숫점 이하의 feature까지 지원)
- Interpolation을 통해 소수점 픽셀 레벨의 pooling을 지원하며, 이를 통해 더 정교한 feature를 뽑아 뒷단의 성능까지 향상시켰다.
Branch [class classification, box regression] → Branch [[class classification, box regression] + mask branch]
TEXT- Mask Branch는 기존의 res를 upsampling하여 80개의 채널에 대해 binary mask로 prediction하는 구조이다.(Mask FCN predictor)- 이 때 어떤 mask를 사용할 것인지는 class classification 결과에 따라 다르다.YOLACT(You Only Look At CoefficienTs)
Real-time으로 semantic segmentation이 가능한 Single-stage detector이다.
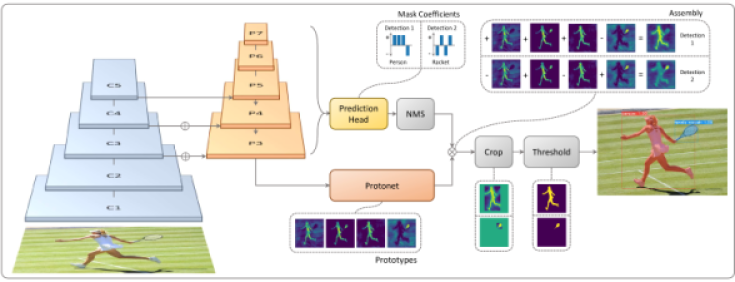
FPN : Feature pyramid를 통해 고해상도의 Feature map을 얻는 Network
Protonet : Mask는 아니지만, Mask를 합성해 낼 수 있는 base가 되는 Prototypes, 즉 여러 물체의 soft segmentation component들을 생성한다. span 가능한 basis라고 볼 수 있다.
Prediction Head : Protonet에서 나온 Prototypes를 적절하게 합성하기 위한 계수, Mask Coefficient를 출력한다.
TEXT- 이후 prototype들과 곱해져 적절한 detection response map(우상단)을 얻게 된다.Mask를 효율적으로 생성하기 위해 Mask R-CNN처럼 Prototype 개수를 80개씩 만들지 않고 훨씬더 적은 개수를 설정하는 대신에, 그 때 그 때 coefficient와의 선형결합으로 찾아냄으로써 메모리 부담을 경감시켰다.
YolactEdge
YOLOACT의 방식을 Edge computing에 접목하기 위해 계산량을 획기적으로 줄인 모델이다.

기존의 frame 중 key frame의 feature를 다음 frame에 전달(transform)하여 계산량을 크게 줄였다.
성능은 비슷하면서도 연산량이 많이 줄었기 때문에 edge device에서의 사용이 가능해졌다.
그러나 아직까지는 마스크가 떨린다던데, 깜빡인다던지 하는 문제가 있다.
Panoptic segmentation
Instance segmentation은 배경에 관심이 없고, 그 위의 물체(객체)를 인스턴스별로 검출하는 데에 탁월했다. 배경을 검출하려면 차라리 Instance segmentation보다는, 개체를 구별할 수 없지만 semantic segmentation이 더 나았다. 이 두가지의 문제점들을 상호 보완하고 동시에 해결하려는 시도로
panoptic segmentation이 나왔다.(Stuff + Instances of Things)UPSNet
그야말로 Semantic segmentation과 Instance segmentation을 합친 형태이다.
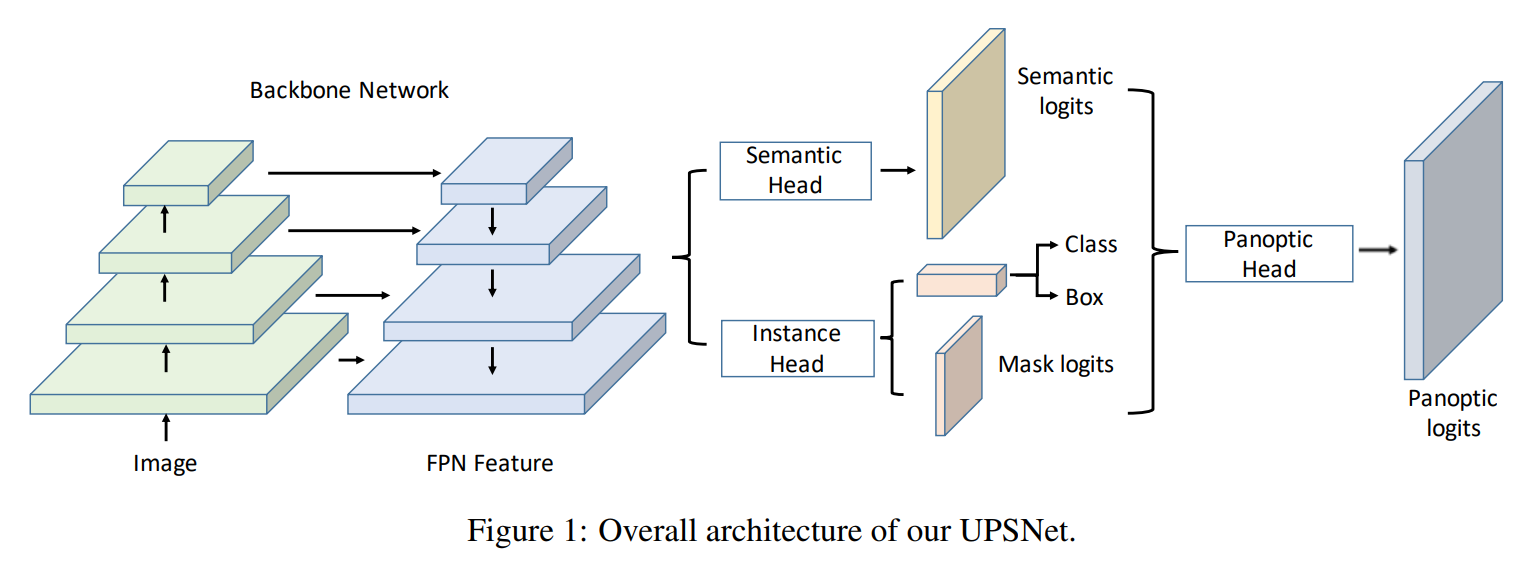
Backbone Network는 FPN으로 고해상도 feature map을 뽑는다.
Semantic Head와 Instance Head가 각각의 역할을 수행한다.
마지막에, Panoptic head가 이 결과들을 융합하여 하나의 Panoptic logit으로 나타낸다.
Architecture of the panoptic segmentation head

Instance Head
- : 개체 구별 Mask
Semantic Head
TEXT- stuff(background) : 그대로 최종 출력(Panoptic logit)에 들어간다.- 물체(thing) : Instance head의 Instance response와 더해져서 최종 출력에 추가된다. 전체 출력에서 어느 위치에 해당 물체가 검출되어야하는지 찾아준다.- 어느 클래스로도 분류되지 않은 물체들은 Unknown class로 모두 합쳐서 1개의 층으로 최종 출력에 추가한다.VPSNet(for video)
단순한 이미지라면 한번의 구별로 끝이나겠지만, 비디오영상이라면 시시각각으로 움직이는 객체들이 매 순간 동일한 객체로 검출되어야할 것이다. VPSNet은 이런 문제를 각 시간별로 모든 픽셀의 대응 관계, 즉 motion을 catch하여 활용하는 Network이다.

이전 시점의 frame(reference frame) feature map을 현재 시점 frame(target frame)에 align하여 검출 률을 높이고, 시간에 따라 smooth한 검출률을 만든다.
- 여기서 Align한다는 것은 픽셀 단위로 Fusion한다는 의미이다.
기존 RoI들과 새로 만들어진 현재의 RoI들을 tracking하여 매치함으로써 어떤 연관이 있는지 ML 학습한다.(Track Head) → 같은 물체는 같은 id를 가질 수 있게 된다.
각 결과들을 모두 합쳐 최종 출력 panoptic map을 형성한다.
Landmark localization
Landmark localization(Keypoint estimation)은 키포인트를 정의하고 추정/tracking하는 데에 사용된다.
얼굴이나 사람의 포즈를 tracking
Coordinate regression vs Heatmap classification
Key points를 찾기 위해 사용할 수 있는 방법
Coordinate regression : 가장 간단하게 생각할 수 있는 방법으로, box regression처럼 각 포인트의 (x,y)를 사용한다. landmark가 N개라면 2N개가 나올 것이다. 그러나 이 방식은 대체로 부정확하고 일반화가 힘들다는 문제가 있었다.
Heatmap classification: semantic segmentation처럼 각 채널이 각각의 keypoint를 담당하고, 각 keypoint가 일종의 class로 분류되어서 각 픽셀별로 classification하는 방법이다. 다만 훨씬 좋은 성능을 냈지만, 연산량이 너무 많았다(모든 픽셀에 대해 수행해야하기때문에)Landmark location to Gaussian heatmap
Heatmap classification에서 x,y 위치(픽셀)가 주어졌을 때, 이걸 히트맵으로 변환하는 방법은 다음과 같다.
: center location
Hourglass network
Heatmap classification을 적절하게 활용한 네트워크구조로
Hourglass Network가 있다.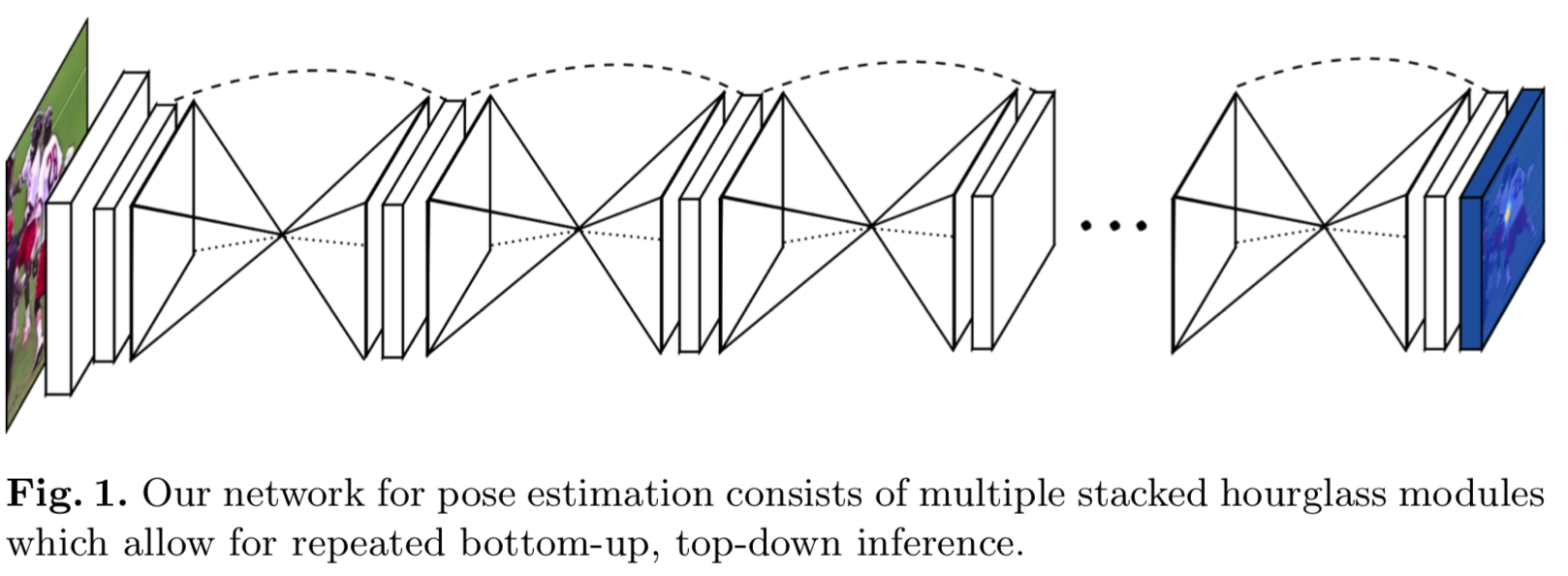
U-Net과 비슷한 구조로, 모래시계같은 형태가 여러 겹 쌓였다고해서 Stacked Hourglass module이라고도 부른다.
Hourglass 구조가 만들어진 이유
영상 전체를 작게 만들어 receptive field를 키움으로써 전반적인 context를 보고 landmark를 파악한다.
low-level feature에서 skip-connection을 수행해서 정확한 landmark의 위치를 파악한다.
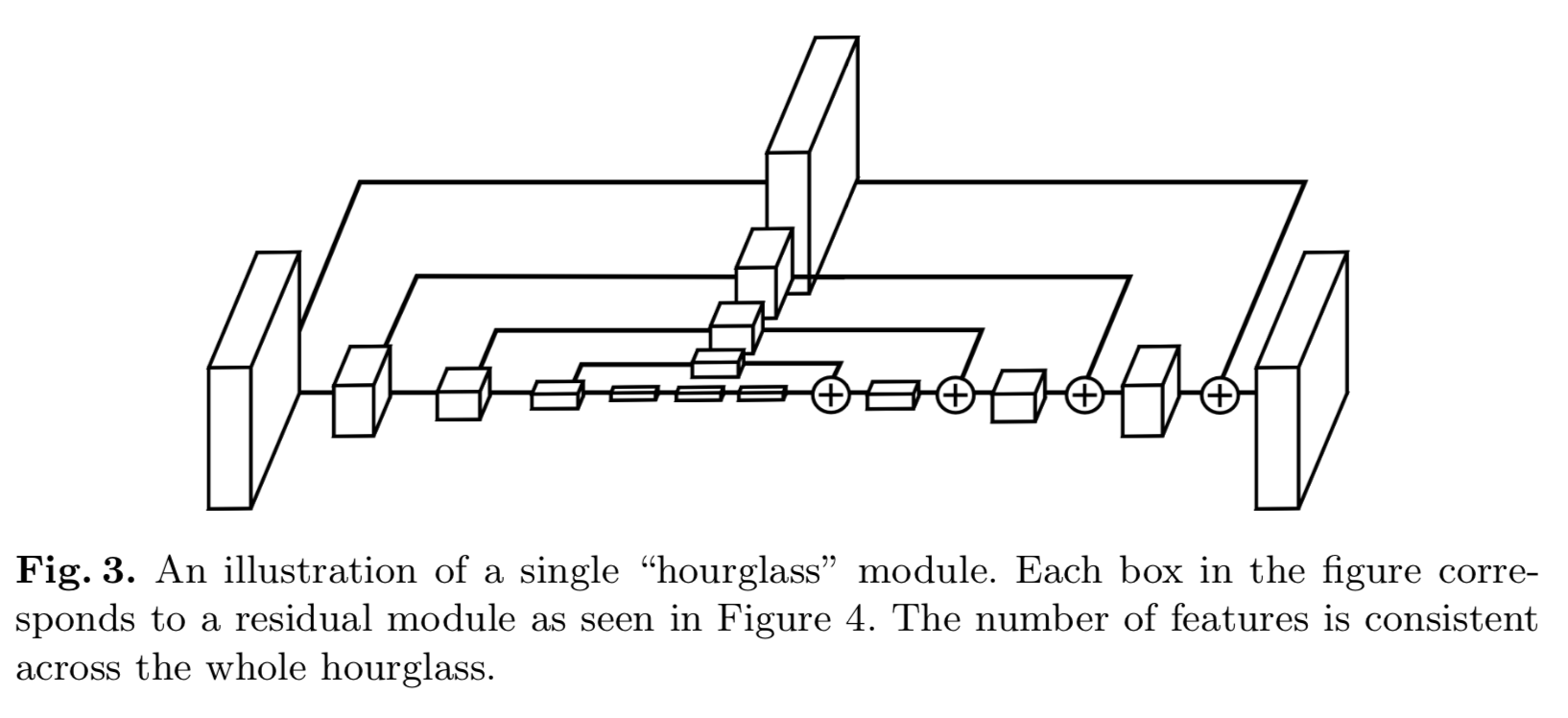
U-Net과 비슷하지만, skip connection이 concat이 아니라 Add라는 것이다. 따라서 매 skip connection마다 dimension이 늘지 않는다. 대신, 단순히 skip하는 것이 아니라 또다른 conv layer를 통과하여 매핑해준다. 이런 점에서는 U-Net보다 FPN에 조금 더 가까운 구조라고 볼수도 있다(Add, Conv)
더 나아가기
DensePose
신체의 모든 부위에 dense한 landmark를 찾는것 → 곧 3D surface를 얻는 것과 같다.
UV map은 이러한 3D surface를 2D로 펼쳐서(flatten) 이미지 형태로 표현한 좌표 표기법이다. 즉, UV map의 2D 좌표 하나는 특정 3D 위치에 1:1로 매칭된다. 사실, UV map은 3D 모델 위에 texture map을 입히기 위해서 고안된 것이다. 이러한 좌표의 특성을 DensePose에서 차용하여 사용하고 있다.
결국, 입력데이터와 출력 Patch(각 segmentation)을 잘 설계함으로써 2D 구조의 CNN으로 3D를 예측하는 방법을 고안해 낸 셈이다.
RetinaFace
Multiscale의 FPN을 이용해 다양한 task의 branch를 모두 넣어 다양한 task를 한번에 풀수 있도록 만든 모델이다(FPN + Multi-task branches). 또는 Multitask 학습법이라고도 부른다.
classification, bounding box, 5 point regression, mesh regression
이 방식들은 조금씩 차이가 있지만 공통적으로 결국 얼굴에 대한 학습이므로, 이 모든 task들을 학습했을 때 좀 더 적은 데이터로도 backbone network 자체가 강인하게 학습되는 장점이 있다.
이러한 경향에서 볼 수 있는 현재 Computer Vision의 큰 흐름은, FPN에 Target-task에 해당하는 head branch만 만들어주어 다양한 응용 모델을 만드는 것이다.
Detecting objects as keypoints
Bounding Box가 아닌 Key point로 object detection을 수행하는 방법에 대해 알아보자.
CornerNet
CornerNet은 Bounding Box가 (좌상단, 우하단) 단 두 개의 점좌표만 있으면 unique하게 결정될 수 있다는 점에 착안하여 고안되었다.
Backbone network(ConvNet)에서 나온 featuremap에 Heatmap을 통하여 각 bounding box의 corner pair를 추출한다.
각 포인터가 가진 정보를 표현하는 Embedding layer를 통과시킨다. 이 때, 같은 코너에서 나온 embedding point는 서로 같은 object를 표현하는 정보임을 학습시킨다.
성능보다는 좀 더 속도에 치중한 모델이다.
CenterNet
1기
CornerNet의 성능을 조금 더 보완하기 위한 방법으로, (좌상단,우하단) 뿐만 아니라 (중앙) 좌표값도 사용한다.
2기
좀 더 정확하게 bounding box를 표현하기 위한 방법으로, (폭, 높이, 중앙)좌표값을 사용한다.
Reference
YOLACT - Real Time Instance Segmentation
Introduction To YolactEdge For Real-time Object Segmentation On Edge Device
- Computer Vision 07 - 조건부 생성 모델(Conditional generative model)
- Computer Vision 08 - Multi-modal Learning
